Hierarchical Bayes Example#
January 6, 2020#
astroML workshop at the 235th Meeting of the American Astronomical Society
Zeljko Ivezic, University of Washington
Resources for this notebook include:#
Highly recommended supplemental background reading:#
For those who want to dive deep:#
Hierarchical Bayes Modeling#
(a.k.a. multilevel models, Bayesian belief networks, or graphical models)
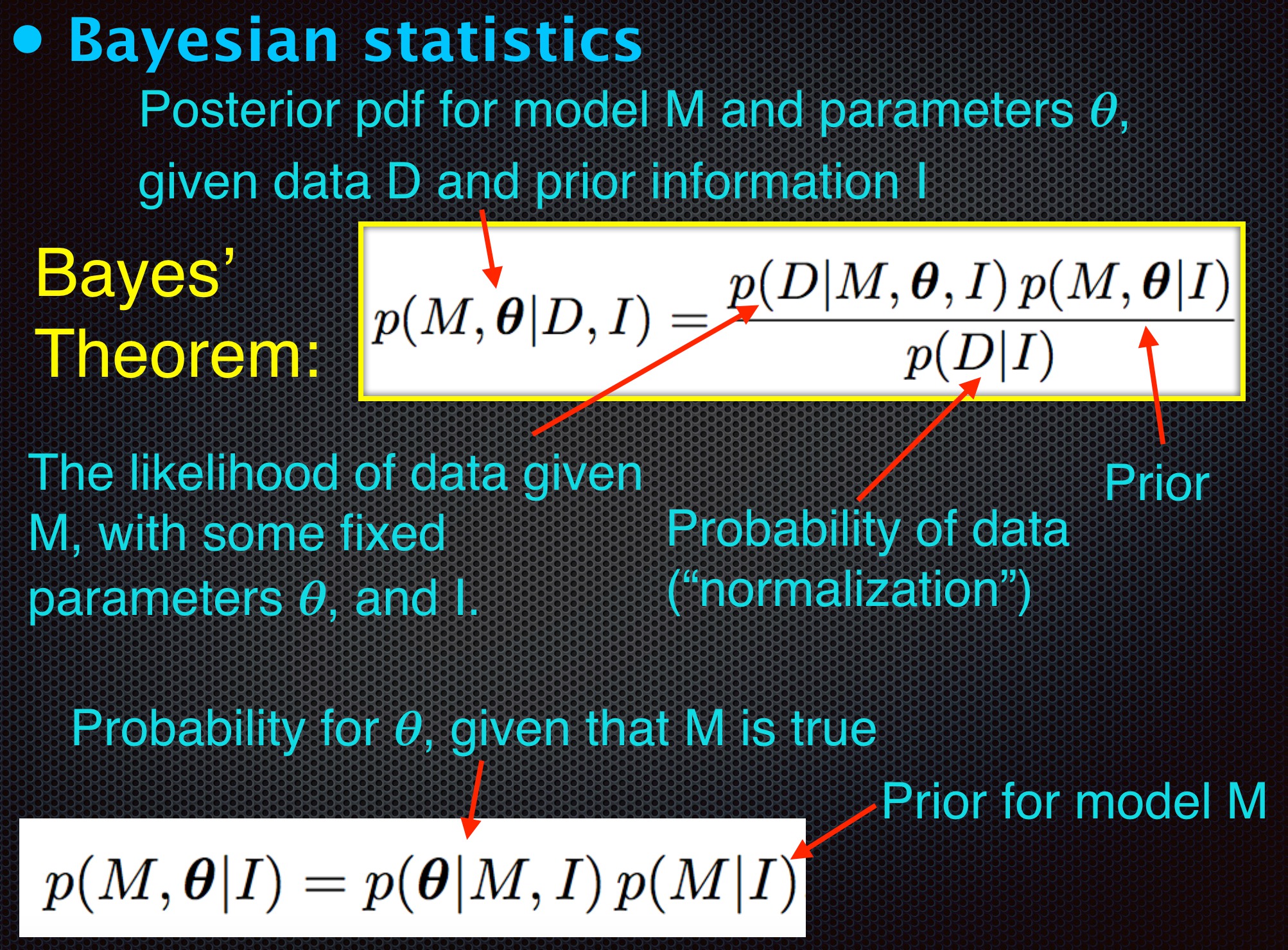
We’ll start with a quick reminder of Bayes’ Theorem and its implications for today’s discussion
Simple case of Gaussian prior and likelihood#
Bayes’ Theorem: $\(p(M|D) = \frac{p(D|M)p(M)}{p(D)} \)$
Let’s assume a one-dimensional problem: we measure length (or mass, or velocity, or metallicity, or …) \(x\), with measurement uncertainty \(e\), and we are trying to estimate \(\mu\), the true length.
We have prior information (belief) for the value of \(\mu\) that can be summarized as N(\(\mu_0\), \(\sigma_0\)). For example, this could be the result of a number of older (prior) measurements.
Simple case of Gaussian prior and likelihood#
Bayes’ Theorem: $\(p(M|D) = \frac{p(D|M)p(M)}{p(D)} \)$
The posterior probability density function is then
When the posterior probability density function is a product of two Gaussians, it is easy to show that \( p(\mu | x, e, \mu_0, \sigma_0)\) can be summarized as a Gaussian $\( p(\mu | x, e, \mu_0, \sigma_0) = \frac{1}{\sigma_p\sqrt{2\pi}} \exp\left(\frac{-(\mu - \mu_p)^2}{2\sigma_p^2}\right),\)$
with $\(\mu_p = \frac{(x/e^2) + (\mu_0/\sigma_0^2)}{1/e^2 + 1/\sigma_0^2} \)\( and \)\( \sigma_p = \left( 1/e^2 + 1/\sigma_0^2 \right)^{-1/2}\)$
Simple case of Gaussian prior and likelihood#
This result, where \(\mu_p\) is obtained by inverse variance weighting, $\(\mu_p = \frac{(x/e^2) + (\mu_0/\sigma_0^2)}{1/e^2 + 1/\sigma_0^2} \,\,\,\, {\rm and} \,\,\,\, \sigma_p = \left( 1/e^2 + 1/\sigma_0^2 \right)^{-1/2}\)$ is quite simple, but very educational. Let’s plot an example…
import numpy as np
from matplotlib import pyplot as plt
from scipy.stats import norm
## case of conjugate prior: both prior and posterior pdfs are gaussian
x = 0.7
e = 0.2
mu0 = 1.4
sigma0 = 0.3
muGrid = np.linspace(0,3,1000)
n1 = norm(x, e).pdf(muGrid)
n2 = norm(mu0, sigma0).pdf(muGrid)
P = n1 * n2
# need to properly normalize P to make it pdf
from scipy.integrate import simps
P = P/simps(P, muGrid)
# for fun, compute mu_p and sigma_p and compare to direct multiplication of n1 and n2
sigma_p = 1/np.sqrt(1/e**2+1/sigma0**2)
mu_p = (x/e**2 + mu0/sigma0**2)*sigma_p**2
posterior = norm(mu_p, sigma_p).pdf(muGrid)
# plot
fig, ax = plt.subplots(figsize=(7, 5))
plt.plot(muGrid, n1, ls='-', c='green', label=r'measurement')
plt.plot(muGrid, n2, ls='-', c='black', label=r'prior')
plt.plot(muGrid, P, ls='-', c='blue', label=r'direct product')
plt.plot(muGrid, posterior, ls='--', c='red', label=r'posterior')
plt.xlim(0.0, 2.5)
plt.ylim(0, 3.0)
plt.xlabel('$\mu$')
plt.ylabel(r'$p(x_i|\mu,\sigma)$')
plt.title('Gaussian prior and Gaussian Likelihood')
plt.legend()
plt.show()
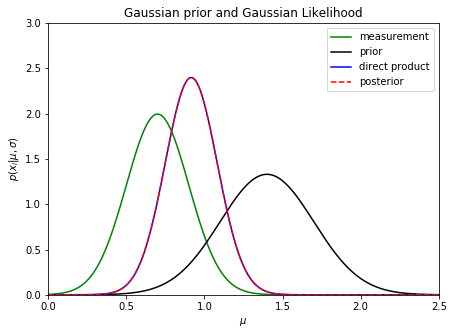
The posterior pdf is narrower than both measurement pdf (i.e. likelihood) and prior pdf (recall that measurement precision often scales as \(1/\sqrt{N}\), where \(N\) is the number of data points)
The posterior pdf is biased compared to the maximum likelihood estimate!
In this example, the likelihood and prior pdfs can be switched and the posterior pdf will remain unchanged
The same posterior pdf is the solution when prior is based on \(N-1\) data points and likelihood corresponds to the \(N\)th data point: an online algorithm!
Let’s now assume we have N measurements (data points)#
Estimating parameters of a Gaussian distribution using data with homoscedastic Gaussian uncertainties#
The data likelihood can be written as:
Here, \(\mu\) and \(\sigma\) can still describe the prior pdf (after rearragning to posterior pdf via Bayes’ theorem). But we can also interpret \(\mu\) and \(\sigma\) as describing an additional (part of the) process that generates data, and that are themselves drawn from flat priors - math is exactly the same.
Let’s now assume we have N measurements (data points)#
Estimating parameters of a Gaussian distribution using data with homoscedastic Gaussian uncertainties#
The posterior pdf for \(\mu\) and \(\sigma\) is:
Because errors are homoscedastic (all data points have uncertainty \(e\)), there is a closed-form solution. For example, we can estimate \(\sigma^2\) by subtracting \(e^2\) from the variance of \(\{x_i\}\) (i.e. if \(\sigma=0\), the width of \(\{x_i\}\) distribution would be simply \(e\)).
Here is another relatively simple case to bring us closer to the main idea of Hierarchical Bayes:#
Estimating parameters of a Gaussian distribution using data with heteroscedastic Gaussian uncertainties#
The posterior pdf for \(\mu\) and \(\sigma\) is:
$\( p(\mu,\sigma | \{x_i\},I) = \prod_{i=1}^N {1 \over \sqrt{2\pi} (\sigma^2+e_i^2)^{1/2}}
\exp{\left({-(x_i-\mu)^2 \over 2 (\sigma^2+e_i^2)}\right)}\)$
There is no closed-form solution here because errors are heteroscedastic (each data point has a different uncertainty \(e_i\)), but we can easily evaluate posterior pdf (say, with uniform priors) on a grid of \(\mu\) and \(\sigma\) (or use more sophisticated methods such as MCMC).
Estimating parameters of a Gaussian distribution using data with heteroscedastic Gaussian uncertainties#
The posterior pdf for \(\mu\) and \(\sigma\) is:
$\( p(\mu,\sigma | \{x_i\},I) = \prod_{i=1}^N {1 \over \sqrt{2\pi} (\sigma^2+e_i^2)^{1/2}}
\exp{\left({-(x_i-\mu)^2 \over 2 (\sigma^2+e_i^2)}\right)}\)$
There is no closed-form solution here because errors are heteroscedastic (each data point has a different uncertainty \(e_i\)), but we can easily evaluate posterior pdf (say, with uniform priors) on a grid of \(\mu\) and \(\sigma\) (or use more sophisticated methods such as MCMC).
The key point is that the scatter of \(\{x_i\}\) is larger than it would be for \(\sigma=0\) (that is, \(\chi^2>1\)) and thus it constrains \(\sigma\).
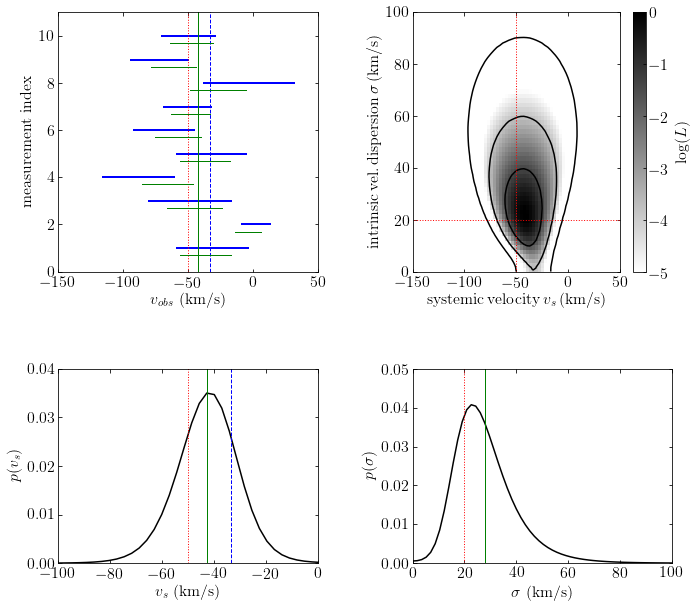
An astrophysical example: radial velocity dispersion for a cluster#
Consider measurements of the radial velocities of \(N\) stars from a stellar or galaxy cluster.
Assume that the cluster radial velocity distribution can be fully characterized by its mean, the systemic velocity (because the whole cluster is moving relative to the observer), and its standard deviation, the cluster velocity dispersion (because objects are gravitationally tied to the cluster and have orbital motions).
An astrophysical example: radial velocity dispersion for a cluster#
Consider measurements of the radial velocities of \(N\) stars from a stellar or galaxy cluster.
The observed dispersion (i.e. standard deviation) of measured velocities is always larger than the cluster velocity dispersion because of measurement errors.
When measurement errors are homoscedastic, we can estimate the cluster velocity dispersion, by subtracting the measurement error contribution from the observed dispersion (i.e. standard deviation) of measured velocities.
An astrophysical example: radial velocity dispersion for a cluster#
When errors are heteroscedastic, we don’t have a closed-form solution.
We can assume that the true radial velocity of a single object is drawn from a Gaussian described by \(\mu\) (systemic velocity) and \(\sigma\) (velocity dispersion). But we don’t know them and thus they need to be estimated from data!
In case of many objects, they will collectively constrain \(\mu\) and \(\sigma\). Many independent measurement sets (here a set of one measurement per object) that share same priors constrain them better together than can any single measurement alone. This is the key idea of Hierarchical Bayes modeling.
Hierarchical Bayes#
In hierarchical, or multilevel, Bayesian analysis a prior distribution depends on unknown variables, the hyperparameters, that describe the group (population) level probabilistic model.
Their priors, called hyperpriors, resemble the priors in simple (single-level) Bayesian models.
In the radial velocity example above, \(\mu\) and \(\sigma\) are priors, and their corresponding prior distributions (assumed flat below), are hyperpriors.
Hierarchical Bayes#
In hierarchical, or multilevel, Bayesian analysis a prior distribution depends on unknown variables, the hyperparameters, that describe the group (population) level probabilistic model.
When there are many independent measurement sets that share same priors, they together constrain priors better than can any single measurement alone.
In statistics, this effect is known as borrowing strength and is related to the concept of shrinkage estimators.
Let’s now look at our radial velocity example numerically.
import numpy as np
from matplotlib import pyplot as plt
from astroML.plotting.mcmc import convert_to_stdev
def gaussgauss_logL(xi, ei, mu, sigma):
"""Equation 5.63: gaussian likelihood with gaussian errors"""
ndim = len(np.broadcast(sigma, mu).shape)
xi = xi.reshape(xi.shape + tuple(ndim * [1]))
ei = ei.reshape(ei.shape + tuple(ndim * [1]))
s2_e2 = sigma ** 2 + ei ** 2
return -0.5 * np.sum(np.log(s2_e2) + (xi - mu) ** 2 / s2_e2, 0)
def getExpStD(x, p):
"""given p(x), compute expectation value and std. dev."""
Ex = np.sum(x * p) / np.sum(p)
Sx = np.sqrt(np.sum((x - Ex) ** 2 * p) / np.sum(p))
return Ex, Sx
# ------------------------------------------------------------
np.random.seed(2) # for repeatability
N = 10 # number of measured stars
mu_true = -50.0 # km/s, true systemic velocity
sigma_true = 20.0 # km/s, true velocity dispersion
ei = 10 + 40 * np.random.random(N) # n.b. heteroscedastic errors
# generate measurements
xi = np.random.normal(mu_true, np.sqrt(sigma_true ** 2 + ei ** 2))
wi = 1 / ei ** 2 / np.sum(1 / ei ** 2)
# weighted mean
wmean = np.sum(wi * xi)
# uncertainty of weighted mean
wmeane = 1 / np.sqrt(np.sum(1 / ei ** 2))
# other stats
medvel = np.median(xi)
meanvel = np.mean(xi)
velstd = np.std(xi)
# define the grids and compute logL
sigma = np.linspace(0.01, 120, 70)
mu = np.linspace(-150, 50, 70)
logL = gaussgauss_logL(xi, ei, mu, sigma[:, np.newaxis])
logL -= logL.max()
L = np.exp(logL)
# integrate L to get marginal prob. distributions
p_sigma = L.sum(1)
p_sigma /= (sigma[1] - sigma[0]) * p_sigma.sum()
p_mu = L.sum(0)
p_mu /= (mu[1] - mu[0]) * p_mu.sum()
#------------------------------------------------------------
from astroML.plotting import setup_text_plots
setup_text_plots(fontsize=16, usetex=False)
# plot the results
fig = plt.figure(figsize=(12, 9.0))
fig.subplots_adjust(left=0.1, right=0.95, wspace=0.24,
bottom=0.15, top=0.9)
fig.add_axes((0.58, 0.55, 0.30, 0.40))
plt.imshow(logL, origin='lower',
extent=(mu[0], mu[-1], sigma[0], sigma[-1]),
cmap=plt.cm.binary,
aspect='auto')
plt.colorbar().set_label(r'$\log(L)$')
plt.clim(-5, 0)
plt.contour(mu, sigma, convert_to_stdev(logL),
levels=(0.683, 0.955, 0.997),
colors='k')
plt.xlabel(r'${\rm systemic \, velocity \, } v_s \, {\rm (km/s)}$')
plt.ylabel(r'${\rm intrinsic \, vel. \, dispersion \,} \sigma \, {\rm (km/s)}$')
plt.xlim(-150, 50.0)
plt.ylim(0, 100)
# plot true values
plt.plot([mu_true, mu_true], [0, 100.0], ':r', lw=1)
plt.plot([-200, 200.0], [sigma_true, sigma_true], ':r', lw=1)
# second axis: marginalized over mu
ax2 = fig.add_axes((0.17, 0.1, 0.3, 0.30))
ax2.plot(mu, p_mu, '-k', label='')
ax2.set_xlabel(r'$v_s$ (km/s)')
ax2.set_ylabel(r'$p(v_s)$')
ax2.set_xlim(-100, 0.0)
ax2.set_ylim(0, 0.04)
# mark expectation value for radial velocity
Ev, Sv = getExpStD(mu, p_mu)
plt.plot([Ev, Ev], [0, 100.0], 'g', lw=1)
# mark true systemic velocity and weighted mean of data
plt.plot([mu_true, mu_true], [0, 100.0], ':r', lw=1)
plt.plot([wmean, wmean], [0, 100.0], '--b', lw=1)
# plot the marginalized distribution for sigma
ax3 = fig.add_axes((0.58, 0.1, 0.3, 0.30))
ax3.plot(sigma, p_sigma, '-k', label='')
ax3.set_xlabel(r'$\sigma$ (km/s)')
ax3.set_ylabel(r'$p(\sigma)$')
ax3.set_xlim(0, 100.0)
ax3.set_ylim(0, 0.05)
plt.plot([sigma_true, sigma_true], [0, 100.0], ':r', lw=1)
Ed, Sd = getExpStD(sigma, p_sigma)
plt.plot([Ed, Ed], [0, 100.0], 'g', lw=1)
# plot data
ax4 = fig.add_axes((0.17, 0.55, 0.3, 0.40))
ax4.set_xlabel(r'$v_{obs}$ (km/s)')
ax4.set_ylabel(r'measurement index')
ax4.set_xlim(-150, 50)
ax4.set_ylim(0, 11)
# mark +-error ranges
for i in range(0, N):
xL = xi[i] - ei[i]
xR = xi[i] + ei[i]
plt.plot([xL, xR], [i + 1, i + 1], 'b', lw=2)
# mark true systemic velocity and weighted mean of data
plt.plot([wmean, wmean], [0, 100.0], '--b', lw=1)
plt.plot([mu_true, mu_true], [0, 100.0], ':r', lw=1)
# mark posterior range for each star
mup = Ev
sigp = Ed
for i in range(0, N):
sig0 = 1 / np.sqrt(1 / sigp ** 2 + 1 / ei[i] ** 2)
mu0 = (mup / sigp ** 2 + xi[i] / ei[i] ** 2) * (sig0 ** 2)
xL = mu0 - sig0
xR = mu0 + sig0
plt.plot([xL, xR], [i + 0.7, i + 0.7], 'g', lw=1)
# and expectation value for systemic velocity
plt.plot([mup, mup], [0, 100.0], 'g', lw=1)
plt.show()
Discussion#
In this particular example, the cluster velocity dispersion is astrophysically the most interesting quantity, while the posterior constraints on radial velocities for individual stars are less important.
However, in other settings described by the same mathematical model the posterior pdfs for the individually measured quantities (i.e., the true radial velocity for each star in the above example) may be of more interest than the priors. In such cases the posterior pdf is marginalized over the priors.
An approximate shortcut approach is to fix the priors at their most probable or expectation values. This method is known as empirical Bayes.
Note that the posterior estimates of true velocities are biased relative to ML estimates, and have smaller uncertainies (hence the name shrinkage) than their measurement uncertainties!
Discussion#
Recently, HB modeling has become an increasingly popular subfield of astrostatistics.
HB modeling in astronomy is often applied to a set of sets of measurements that have something in common, such as measurements of individual phenomena that come from the same population (c.f. the above radial velocity example).
Good examples include measurements of faint sources that share the same background, of individual supernova luminosities drawn from a population of cosmological type Ia supernovae, estimates of spectral energy distribution of stars that are all behind the same dust layer with unknown extinction properties, and estimates of planetary orbital eccentricity distribution.
Discussion#
Another very important application of HB modeling, that is becoming more common, is accounting for measurement errors, intrinsic variance across a population, and various astronomical selection effects; a rather complex modeling framework is discussed in detail in a landmark study by Kelly et al. 2007 (ApJ 665, 1489).