![]()
Analysis of Stochastic Processes¶
Introduction¶
Stochastic variability includes behavior that is not predictable forever as in the periodic case, but
unlike temporally localized events, variability is always there. Typically, the underlying physics is
so complex that we cannot deterministically predict future values.
Despite their seemingly irregular behavior, stochastic processes can be quantified. In this notebook, we will mainly discuss autocorrelation, autoregressive and damped random walk models in analyzing stochastic processes.
Import functions¶
In this notebook, we mainly use functions from astroML.time_series and from astroML.fourier.
import numpy as np
from matplotlib import pyplot as plt
from astroML.time_series import generate_power_law
from astroML.fourier import PSD_continuous
from astroML.time_series import lomb_scargle, generate_damped_RW
from astroML.time_series import ACF_scargle, ACF_EK
from astroML.plotting import setup_text_plots
setup_text_plots(usetex=True)
The autocorrelation and structure functions¶
One of the main statistical tools for the analysis of stochastic variability is the autocorrelation
function. It represents a specialized case of the correlation function of two functions, f(t) and g(t),
scaled by their standard deviations, and defined at time lag  as
as

where  and
and  are standard deviations of f(t) and g(t), respectively. With this normalization, the
correlation function is unity for = 0 (without normalization by standard deviation, the above
expression is equal to the covariance function). It is assumed that both f and g are statistically
weakly stationary functions, which means that their mean and autocorrelation function (see below)
do not depend on time. The correlation function yields information about the time delay
between two processes. If one time series is produced from another one by simply shifting the time
axis by tlag, their correlation function has a peak at
are standard deviations of f(t) and g(t), respectively. With this normalization, the
correlation function is unity for = 0 (without normalization by standard deviation, the above
expression is equal to the covariance function). It is assumed that both f and g are statistically
weakly stationary functions, which means that their mean and autocorrelation function (see below)
do not depend on time. The correlation function yields information about the time delay
between two processes. If one time series is produced from another one by simply shifting the time
axis by tlag, their correlation function has a peak at  .
.
With  , the autocorrelation of y(t) defined at time lag is
, the autocorrelation of y(t) defined at time lag is

The autocorrelation function yields information about the variable timescales present in a process.
When y values are uncorrelated (e.g., due to white noise without any signal),  , except for
, except for  . For processes that “retain memory” of previous states only for some characteristic
time
. For processes that “retain memory” of previous states only for some characteristic
time  , the autocorrelation function vanishes for
, the autocorrelation function vanishes for  .
.
The autocorrelation function and the PSD of function y(t) (i.e.  ) are Fourier pairs; this
fact is known as the Wiener-Khinchin theorem and applies to stationary random processes. The
former represents an analysis method in the time domain, and the latter in the frequency domain.
) are Fourier pairs; this
fact is known as the Wiener-Khinchin theorem and applies to stationary random processes. The
former represents an analysis method in the time domain, and the latter in the frequency domain.
The structure function is another quantity closely related to the autocorrelation function,
![SF(\Delta t) = SF_\infty [1-ACF(\Delta t)]^{\frac{1}{2}}](../../_images/math/7d209272d498687a64d2c145752ea64f8932ffbd.png)
where  is the standard deviation of the time series evaluated over an infinitely large time
interval (or at least much longer than any characteristic timescale ).
is the standard deviation of the time series evaluated over an infinitely large time
interval (or at least much longer than any characteristic timescale ).
Examples of stochastic processes:  and
and  processes¶
processes¶
For a given autocorrelation function or PSD, the corresponding time series can be generated using
the algorithm described in On generating power law noise. Essentially, the amplitude of the Fourier transform is given by the
PSD, and phases are assigned randomly; the inverse Fourier transform then generates time series.
The connection between the PSD and the appearance of time series of two power-law PSDs: and is illustrated in figure below.
1. Generate data for plotting¶
Let us use 1024 data points, and let  in this case.
in this case.
N = 1024
dt = 0.01
factor = 100
t = dt * np.arange(N)
random_state = np.random.RandomState(1)
2. Calculate PSD and compare results¶
We use generate_power_law in astroML_time_series package to apply the algorithm On generating power law noise on our generated data.
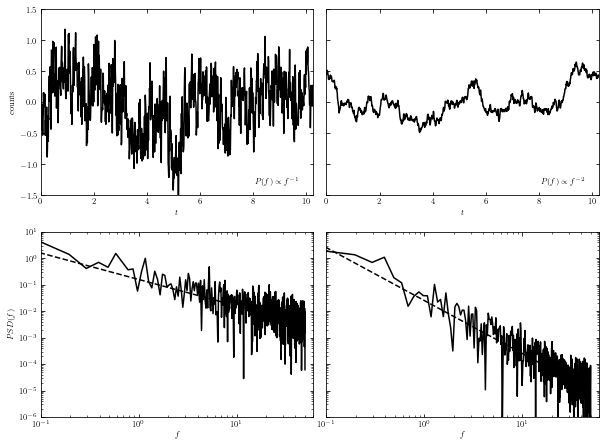
In the plot below shows examples of stochastic time series generated from power-law PSDs.
Plots of generated data (top panels) and the corresponding PSD (bottom panels) are shown.
Results from
power-law (left panels) and from (right panel) are shown.Dashed lines indicate input PSD, and solid lines are determined from time series shown in the top panels.
The PSD normalization is such that both cases have similar
power at low frequencies. For this reason, the overall amplitudes (more precisely, the variance) of
the two time series are similar. The power at high frequencies is much larger for the case, and
this is why the corresponding time series has the appearance of noisy data.
The structure function for the process is constant, and proportional to  for
the process (remember that we defined structure function with a square root).
for
the process (remember that we defined structure function with a square root).
fig = plt.figure(figsize=(10, 7.5))
fig.subplots_adjust(wspace=0.05)
for i, beta in enumerate([1.0, 2.0]):
# Generate the light curve and compute the PSD
x = factor * generate_power_law(N, dt, beta, random_state=random_state)
f, PSD = PSD_continuous(t, x)
# First axes: plot the time series
ax1 = fig.add_subplot(221 + i)
ax1.plot(t, x, '-k')
ax1.text(0.95, 0.05, r"$P(f) \propto f^{-%i}$" % beta,
ha='right', va='bottom', transform=ax1.transAxes)
ax1.set_xlim(0, 10.24)
ax1.set_ylim(-1.5, 1.5)
ax1.set_xlabel(r'$t$')
# Second axes: plot the PSD
ax2 = fig.add_subplot(223 + i, xscale='log', yscale='log')
ax2.plot(f, PSD, '-k')
ax2.plot(f[1:], (factor * dt) ** 2 * (2 * np.pi * f[1:]) ** -beta, '--k')
ax2.set_xlim(1E-1, 60)
ax2.set_ylim(1E-6, 1E1)
ax2.set_xlabel(r'$f$')
if i == 1:
ax1.yaxis.set_major_formatter(plt.NullFormatter())
ax2.yaxis.set_major_formatter(plt.NullFormatter())
else:
ax1.set_ylabel(r'${\rm counts}$')
ax2.set_ylabel(r'$PSD(f)$')
Autocorrelation and structure function for evenly and unevenly sampled data¶
Evenly sampled data¶
In the case of evenly sampled data, with  , the autocorrelation function of a discretely sampled
, the autocorrelation function of a discretely sampled  is defined as
is defined as
![ACF(j) = \frac{\sum^{N-j}_{i=1} [(y_i-\bar{y})(y_{i+j}-\bar{y})]}{\sum^{N}_{i=1}(y_i-\bar{y})^2}](../../_images/math/a8963b055947176ce724e19188356bce5ef9b1c8.png)
The uncertainty of the mean is
![\sigma_{\bar{x}} = \frac{\sigma}{\sqrt{N}}[1+2 \sum^N_{j=1}(1-\frac{j}{N})ACF(j)]^{1/2}](../../_images/math/857ff4729429752e4862403b0ada5305cfaa5b9b.png)
where  is the homoscedastic measurement error.
is the homoscedastic measurement error.
When a time series has a nonvanishing ACF, the uncertainty of its mean is larger than for an uncorrelated data set, where  .
.
When data are unevenly sampled, the ACF cannot be computed using equations above.
Unevenly sampled data¶
For the case of unevenly sampled data, Edelson and Krolik proposed the “discrete correlation function” (DCF) in an astronomical context (called the “slot autocorrelation function” in physics). See The Discrete Correlation Function.
For discrete unevenly sampled data with homoscedastic errors, they defined a quantity
![UDCF_{ij} = \frac{(y_i-\bar{y})(g_j-\bar{g})}{[(\sigma_y^2-e_y^2)(\sigma_g^2-e_g^2)^{1/2}]}](../../_images/math/520ad0836ec3b2c53fcfae2bc1b5c898d6376003.png)
where  and
and  are homoscedastic measurement errors for time series y and g. The associated time
lag is
are homoscedastic measurement errors for time series y and g. The associated time
lag is  . The discrete correlation function at time lag is then computed by binning
and averaging
. The discrete correlation function at time lag is then computed by binning
and averaging  over M pairs of points for which
over M pairs of points for which  , where
, where  is
the bin size. The bin size is a trade-of between accuracy of
is
the bin size. The bin size is a trade-of between accuracy of  and its resolution. Edelson and Krolik showed that even uncorrelated time series will produce values of the cross-correlation
and its resolution. Edelson and Krolik showed that even uncorrelated time series will produce values of the cross-correlation  .
.
Scargle has developed different techniques to evaluate the discrete Fourier transform, correlation
function and autocorrelation function of unevenly sampled time series (see Studies in astronomical time series analysis. III.).
Given an unevenly sampled time series, y(t), the essential steps of Scargle’s
procedure are as follows:
Compute the generalized Lomb-Scargle periodogram for
 , namely
, namely  .
.Compute the sampling window function using the generalized Lomb-Scargle periodogram using
 , namely
, namely  .
.Compute inverse Fourier transforms for
and  , namely
, namely  and
and  , respectively.
, respectively.The autocorrelation function at lag t is
 .
.
Edelson and Krolik’s DCF method and the Scargle method Demonstration¶
We will see an example of the use of Edelson and Krolik’s DCF method and the Scargle method.
1. Generate time-series data¶
We use do 1000 days worth of magnitudes for this sample data.
t = np.arange(0, 1E3)
z = 2.0
tau = 300
tau_obs = tau / (1. + z)
np.random.seed(6)
y = generate_damped_RW(t, tau=tau, z=z, xmean=20)
# randomly sample 100 of these
ind = np.arange(len(t))
np.random.shuffle(ind)
ind = ind[:100]
ind.sort()
t = t[ind]
y = y[ind]
# add errors
dy = 0.1
y_obs = np.random.normal(y, dy)
2. Compute ACF via Scargle method¶
We calculate the ACF following Scargle method process.
C_S, t_S = ACF_scargle(t, y_obs, dy,
n_omega=2. ** 12, omega_max=np.pi / 5.0)
ind = (t_S >= 0) & (t_S <= 500)
t_S = t_S[ind]
C_S = C_S[ind]
3. Compute ACF via E-K method¶
We calculate ACF using Edelson and Krolik’s DCF method.
C_EK, C_EK_err, bins = ACF_EK(t, y_obs, dy, bins=np.linspace(0, 500, 51))
t_EK = 0.5 * (bins[1:] + bins[:-1])
4. Compare results¶
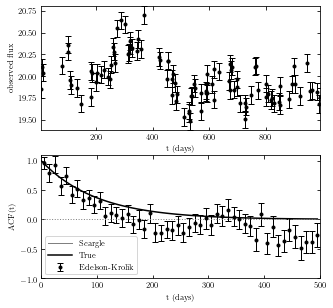
Example of the autocorrelation function for a stochastic process is shown below.
The top panel shows a simulated light curve generated using a damped random walk model.
The bottom panel shows the corresponding autocorrelation function computed using Edelson and Krolik’s DCF method and the Scargle method.
The solid line shows the input autocorrelation function used to generate the light curve.
The two methods produce similar results. Errors are easier to compute for the DCF method and this advantage is crucial when fitting models to the autocorrelation function.
# Plot the results
fig = plt.figure(figsize=(5, 5))
# plot the input data
ax = fig.add_subplot(211)
ax.errorbar(t, y_obs, dy, fmt='.k', lw=1)
ax.set_xlabel('t (days)')
ax.set_ylabel('observed flux')
# plot the ACF
ax = fig.add_subplot(212)
ax.plot(t_S, C_S, '-', c='gray', lw=1,
label='Scargle')
ax.errorbar(t_EK, C_EK, C_EK_err, fmt='.k', lw=1,
label='Edelson-Krolik')
ax.plot(t_S, np.exp(-abs(t_S) / tau_obs), '-k', label='True')
ax.legend(loc=3)
ax.plot(t_S, 0 * t_S, ':', lw=1, c='gray')
ax.set_xlim(0, 500)
ax.set_ylim(-1.0, 1.1)
ax.set_xlabel('t (days)')
ax.set_ylabel('ACF(t)')
Text(0, 0.5, 'ACF(t)')
Autoregressive models¶
Autocorrelated time series can be analyzed and characterized using stochastic “autoregressive models.” Autoregressive models provide a good general description of processes that “retain memory” of previous states (but are not periodic). An example of such a model is the random walk, where each new value is obtained by adding noise to the preceding value:

When  is multiplied by a constant factor greater than 1, the model is known as a geometric
random walk model (used extensively to model stock market data). The noise need not be Gaussian.
is multiplied by a constant factor greater than 1, the model is known as a geometric
random walk model (used extensively to model stock market data). The noise need not be Gaussian.
The random walk can be generalized to the linear autoregressive (AR) model with dependencies on k past values (i.e., not just one as in the case of random walk). An autoregressive process of order k, AR(k), for a discrete data set is defined by
That is, the latest value of y is expressed as a linear combination of the k previous values of y, with the addition of noise (for random walk, k = 1 and a1 = 1). If the data are drawn from a stationary process, coefficients aj satisfy certain conditions. The ACF for an AR(k) process is nonzero for all lags, but it decays quickly.
An autoregressive process defined by  applies only to evenly sampled time series. A
generalization is called the continuous autoregressive process, CAR(k); see Are the Variations in Quasar Optical Flux Driven by Thermal Fluctuations. The CAR(1)
process has recently received a lot of attention in the context of quasar variability.
applies only to evenly sampled time series. A
generalization is called the continuous autoregressive process, CAR(k); see Are the Variations in Quasar Optical Flux Driven by Thermal Fluctuations. The CAR(1)
process has recently received a lot of attention in the context of quasar variability.
In addition to autoregressive models, data can be modeled using the covariance matrix (e.g., using Gaussian process in Gaussian process regression section). For example, for the CAR(1) process,

where and are model parameters;  controls the short timescale covariance (
controls the short timescale covariance ( ),
which decays exponentially on a timescale given by . A number of other convenient models
and parametrizations for the covariance matrix are discussed in the context of quasar variability
in Is quasar variability a damped random walk?.
),
which decays exponentially on a timescale given by . A number of other convenient models
and parametrizations for the covariance matrix are discussed in the context of quasar variability
in Is quasar variability a damped random walk?.
Damped random walk model¶
The CAR(1) process is described by a stochastic differential equation which includes a damping term that pushes y(t) back to its mean (see Is quasar variability a damped random walk?);
hence, it is also known as damped random walk. In analogy with calling random walk “drunkard’s walk,” damped random walk could
be called “married drunkard’s walk” (who always comes home instead of drifting away).
Following  , the autocorrelation function for a damped random walk is
, the autocorrelation function for a damped random walk is

where is the characteristic timescale (relaxation time, or damping timescale). Given the  ,
it is easy to show that the structure function is
,
it is easy to show that the structure function is
![SF(t) = SF_{\infty} [1-exp(-t/ \tau)]^{1/2}](../../_images/math/50b582b71ab2b585722d373a851f52207d2e999d.png)
where  is the asymptotic value of the structure function equal to
is the asymptotic value of the structure function equal to  , where has the same definition as in . When the structure function applies to differences of the analyzed process
, where has the same definition as in . When the structure function applies to differences of the analyzed process
Therefore, the damped random walk is a process at high frequencies, just as ordinary random
walk. The “damped nature” is seen as the at PSD at low frequencies ( ). In the previous figure demonstrating E-K method and Scargle method, a light curve generated using a damped random walk is shown in the top panel.
). In the previous figure demonstrating E-K method and Scargle method, a light curve generated using a damped random walk is shown in the top panel.
For evenly sampled data, the  process is equivalent to the
process is equivalent to the  process with
process with  , that is, the next value of
, that is, the next value of  is the damping factor times the previous value plus noise.
The noise for the process,
is the damping factor times the previous value plus noise.
The noise for the process,  is related to via
is related to via
![\sigma_{AR} = \frac{SF_{\infty}}{\sqrt{2}} [1-exp(-2 / \tau)]^{1/2}](../../_images/math/01853e15c670450713da2990bf4a913d776d25ed.png)